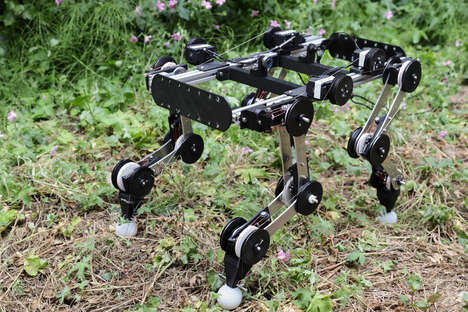
MIT introduces its new and improved Cheetah 3 robot designed to combat disaster zones and environments too dangerous to access. Some new functions of the technology include leaping and galloping through rough terrains, climbing stairs with debris, and quick balance recovery -- all which can be done without relying on camera help. The control algorithm can predict how much force each leg should apply with every step, using a contact detection and model-predictive control algorithm -- this is what the engineers call "blind locomotion."
The contact detection algorithm is able to determine the best possible time to swing each leg and the model-predictive control algorithm determines the position and force of the robot's body and legs. In addition to the elevated blind locomotive component, the Cheetah 3 also boasts a new and improved hardware, allowing it to twist from side to side, stretch both forward and backward, and limbering up for a cat-like pounce.
Key Themes Behind This Trend
- Disaster Combat Robots
- Opportunity for developing robots specifically designed to navigate and operate in disaster zones without relying on cameras.
- Terrain-traversing Robots
- Disruptive potential exists for robots that can leap, gallop, climb stairs, and recover balance in rough terrains.
- Blind Locomotion Algorithm
- Innovation opportunity in creating algorithms that enable robots to predict and adjust leg force and body/leg position without visual input.
Where This Applies
- Robotics
- The robotics industry can explore the development of specialized robots for disaster response and terrain traversal.
- Emergency Services
- Opportunity for emergency services to integrate advanced robotic technologies into their disaster response strategies.
- Algorithm Development
- The algorithm development industry can focus on creating advanced algorithms for blind locomotion and robot control in challenging environments.