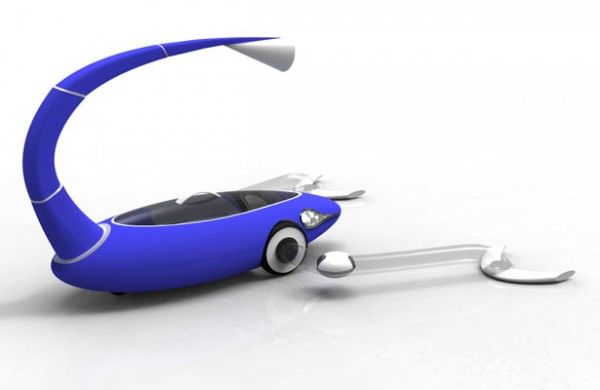
From Swiss Maker ETH Zurich, the Naro-Tartaruga is a turtle-inspired aquatic machine designed to transport cargo and swim efficiently.
In its current design phase, the autonomous robot is a cylindrical aluminum vessel with flippers with a top speed of about seven knots, making it significantly faster than any real-life sea turtle.
The torso houses the battery, sensors and other components required for autonomous function and each fin has three actuators that allow for three-dimensional movement in the water.
The main goal of the Naro-Tartaruga project is to determine if flapping fins provide a more efficient swimming mechanism than traditional propeller design. If it wins, it could provide a model for future generations of underwater autonomous vehicles.
What's Driving This Trend
- Autonomous Underwater Vehicles
- The Naro-Tartaruga project explores the potential of flapping fins for more efficient swimming, paving the way for future generations of underwater autonomous vehicles.
- Bio-inspired Robotics
- The turtle-inspired design of the Naro-Tartaruga showcases the innovation potential of taking inspiration from nature for robotics development.
- Efficient Cargo Transportation
- The Naro-Tartaruga's design as an aquatic robot for cargo transport offers disruptive innovation opportunities in the marine logistics industry.
Who This Affects Most
- Robotics
- The advancements in bio-inspired robotics from the Naro-Tartaruga project can revolutionize the field of robotics.
- Autonomous Vehicles
- The research on flapping fins for efficient swimming in the Naro-Tartaruga project contributes to advancements in autonomous underwater vehicles.
- Marine Logistics
- The development of the Naro-Tartaruga as an aquatic robot for cargo transport presents innovative solutions for the marine logistics industry.