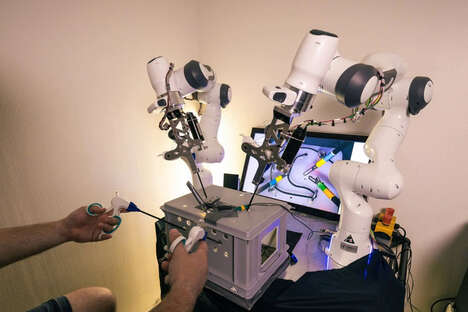
Currently, robots are controlled using a joystick or other traditional input device. However, a novel system developed by Tokyo University engineer Tsuyoshi Horo, allows operators to issue commands to robots using simple hand and body gestures. And it is not limited for controling robots; Horo has also implemented several computer user interface prototypes using the same basic system. The system uses a circular array of cameras to detect human movements in the room, then convey them to a robot as directional commands. It produces a real time 3-D volumetric model of people or objects inside the circle of cameras, allowing for precise tracking of movements. Check the videos above and below.
What's Driving This Trend
- Gesture-controlled Robotics
- Disruptive innovation opportunity: Develop new robotics systems that can be controlled using simple hand and body gestures, eliminating the need for traditional input devices.
- Computer User Interface Prototypes
- Disruptive innovation opportunity: Use the basic gesture control system to create innovative computer user interfaces, making interaction more intuitive and responsive.
- Real-time 3-D Tracking
- Disruptive innovation opportunity: Develop advanced camera systems that can generate real-time 3-D volumetric models, enabling precise tracking of movements for various applications.
Who This Affects Most
- Robotics
- Disruptive innovation opportunity: Apply gesture-controlled technology to robotics industry, revolutionizing how robots are controlled and enhancing their capabilities.
- Computer Hardware
- Disruptive innovation opportunity: Incorporate gesture control into computer hardware, creating more intuitive and immersive user experiences.
- Camera Technology
- Disruptive innovation opportunity: Improve camera technology to capture real-time 3-D volumetric models, revolutionizing tracking and surveillance systems.