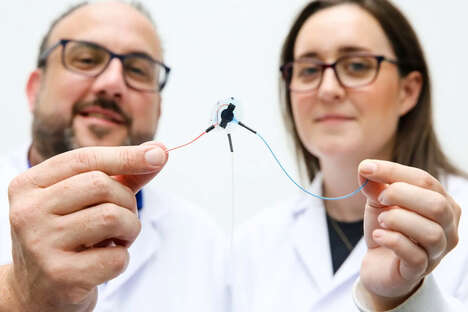
With each development in technology and optimization in material use, it is becoming apparent that soft robots have a future in performing complicated surgery. Researchers at Harvard University "demonstrate their new soft material micro-fabrication process" which will enable robotic devices to act as a tool during invasive procedures.
The innovative soft robot takes on the appearance of an eight-legged spider, whose form is informed by "the colorful Australian peacock spider." The miniature tech device is made with silicone layers and its movements are controlled by a "phase-changing material" that is injected inside of the soft robot's body. In doing so, the researchers are able to add more precision in the use of such technology. The process bears the name of "microfluidic origami for reconfigurable pneumatic/hydraulic devices" (or MORPH, for short).
Photo Credits: Wyss Institute at Harvard University
Key Themes Behind This Trend
- Soft Robot Surgery
- The development of soft robots for performing complicated surgery is gaining momentum, with potential for disruptive innovation in the medical industry.
- Micro-fabrication Technology
- Advancements in micro-fabrication processes are enabling the creation of innovative soft robots, opening opportunities for disruptive innovation in various industries.
- Phase-changing Materials
- The use of phase-changing materials in soft robot design is revolutionizing their movements and precision, leading to disruptive innovation in robotics and automation.
Where This Applies
- Medical
- The medical industry can benefit from soft robots in performing invasive procedures with increased precision and improved patient outcomes.
- Manufacturing
- The manufacturing industry can explore the use of micro-fabrication technology to develop innovative soft robots for automated processes and assembly lines.
- Robotics
- The robotics industry can leverage phase-changing materials to create more agile and precise soft robots, revolutionizing automation and robotics applications.